Telepresence has been around for a while, with telerobotics only recently coming into commercial applications.
Build details
- Strip the wheelchair to its basics.
- Remove the electric brakes from the motors (more on this later)
- Re-wire the 2 12V batteries from serial (24V) to paralell (12V) to increase runtime.
- Add a “pole” to bring the monitor and webcam up to standing eye level.
- Add supporting electronics.
- Write software.
The Pictures

We use the T-Shirt to cover the keyboard to deter people from randomly typing on it 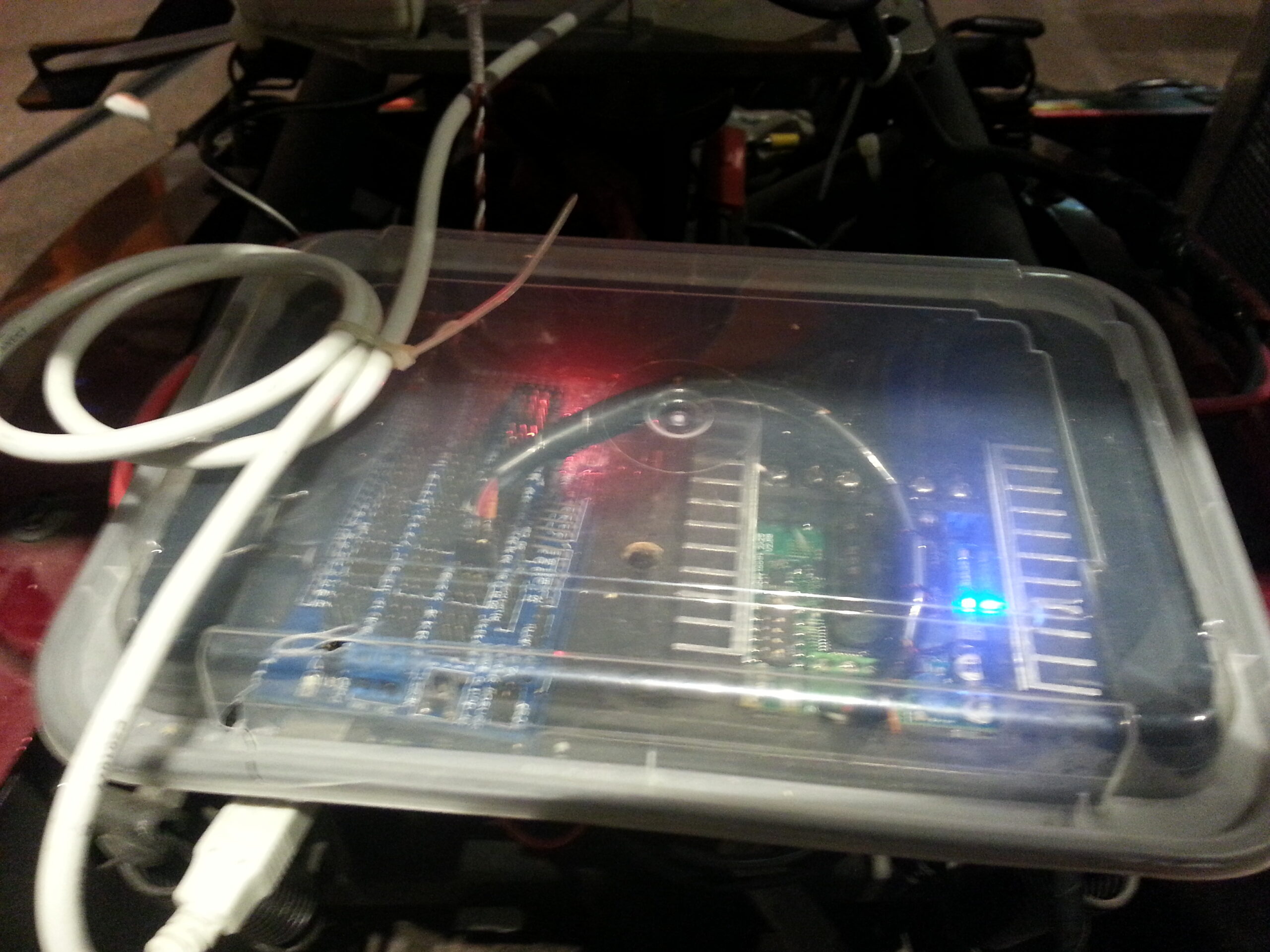
an Arduino Mega with ITead sensor shield, and Sabertooth 2×25 motor controller 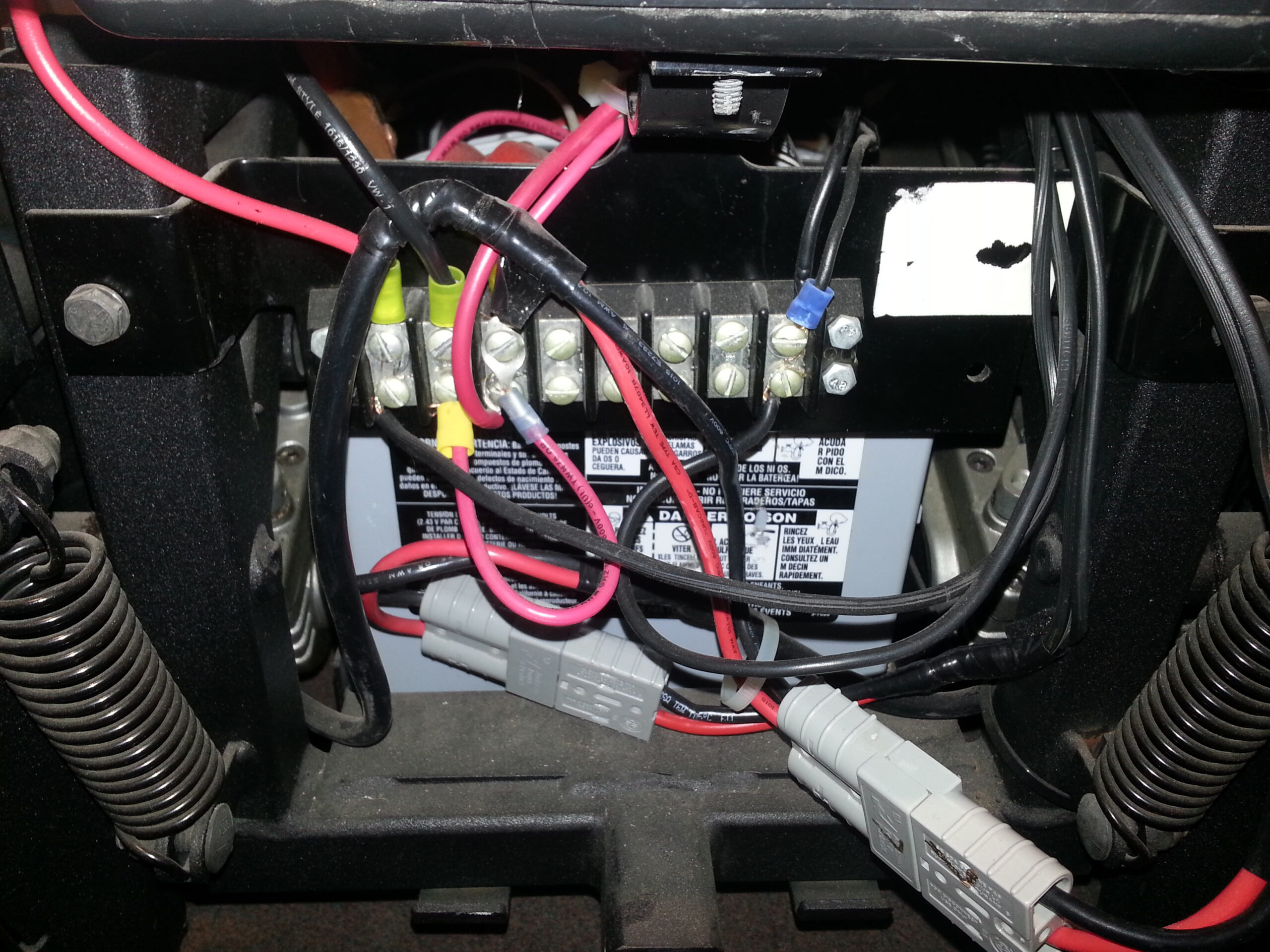
One of the 2 batteries, the 12V power bus, and a couple of the power plugs 
AMD E-Series Nettop PC mounted under the platform, and Wifi-N router for isolated demo driving 
Power inverter, batteries, power strip
The parts
Here’s the parts we used. Most of this is substitutable for equivalents or more appropriate parts for your build. See photos at end of this page.
- Pronto wheelchair
- Sabertooth 2×25 motor controller
- Arduino Mega (an Uno will also work with the current code)
- ITead Sensor shield (a proto shield would work fine)
- several high power plugs salvaged from power backup batteries (such as APC UPS)
- a common light switch and box for a motor power “kill switch”
- an AMD E-series powered NetTop media PC.
- a 15″ LCD
- length of iron pipe threaded on both ends with “floor plates” for mounting
- 12VDC to 120VAC power inverter to run the PC
- Wifi-N router (the Nettop’s wifi was found unreliable, and this also allows us to demo when no internet is available.
- IR receiver and remote salvaged from a non-functional digital picture frame
- “power bus” terminal strip
- keyboard mounting tray